
ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر side image

ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر side image
ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر side image

ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر side image

ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر side image

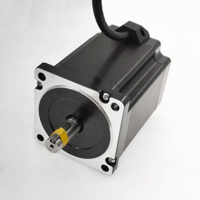
ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر
IQD 70,000
الوصف


● Small step angle and high precision;
● The number of pole pairs is equal to the number of rotor teeth, which can be changed in a wide range as required;
● The winding inductance changes little with the rotor position, which is easy to achieve the best operation control;
● Axial magnetizing magnetic circuit, using a new type of permanent magnet material with high magnetic energy product, which is conducive to the improvement of motor performance;
● The rotor magnet provides excitation; there is no obvious oscillation in the entire operating area.
Naming Rules
42 HB 40 F 105 B- -06
○1 ○2 ○3 ○4 ○5 ○6 ○7
○1: 42: Motor frame: 42*42mm
○2: HB: Hybrid stepping motor
○3: 40: Length of motor body
○4: F: Number of leads: four lines, S: six lines, E: 8 lines
○5: 105: Motor rated current value 1.5A
○6: B: There is a flat wire on the motor shaft, CL stands for gear D stands for double output shaft PJ stands for keyway
○7: 06: Derivative number
Brief Introduction of Technical Characteristics
General technical characteristics
● The stepping motor is used in low-speed occasions---the speed does not exceed 1000 revolutions per minute, (6666PPS at 0.9 degrees), preferably between 1000-3000PPS (0.9 degrees), and it can be used here by a decelerating device. When the motor has high working efficiency and low noise;
● It is best not to use the full-step state for the stepping motor, because the vibration is large in the full-step state;
● The voltage value in the motor specification is not the driving voltage volt value. The specific driving voltage can be selected according to the stepper driver (recommendation: 42 and below motors use 12-24V, 57 motors use DC 24V-48V, 86 use DC 48-80V, 110 The motor adopts higher than DC 80V)
● For loads with large moments of inertia, a large frame size motor should be selected;
● When the motor is in a relatively high-speed or large inertia load, it generally does not start at the working speed, but uses a gradual frequency increase to increase the speed. First, the motor does not lose step, and second, it can reduce the noise and improve the positioning accuracy of the stop;
● For high precision, it should be solved by mechanically decelerating, increasing the motor speed, or using a driver with a high subdivision number;
● The motor should not work in the vibration zone, if necessary, it can be solved by changing the voltage, current or adding some damping;
● When the motor works below 600PPS (0.9 degrees), it should be driven by small current, large inductance, and low voltage.
Mechanical technical characteristics
● When installing/removing the shaft end of a stepping motor with a coupling part, do not directly hit the shaft end with a hammer. (The hammer hits the shaft end directly, and the encoder at the other end of the stepper motor shaft may be damaged);
● Try to align the shaft ends to the best condition to ensure good concentricity, otherwise vibration may occur, the bearing may be damaged, and the shaft may even be broken;
● The motor can be used in places that will be attacked by water or oil drops, but it is not completely waterproof or oil-proof. The default protection level is IP54. Therefore, the motor should not be placed or used in an environment corroded by water or oil (if necessary For special protection level, please contact us!);
● If the motor is connected to a reduction gear, oil seals should be added when using a stepper motor to prevent the reduction gear from entering the stepper motor;
● Do not immerse the motor cable in oil or water. Ensure that the cable is not subjected to moment or vertical load due to external bending force or its own weight, especially at the cable outlet or connection.
● When the motor is moving, the cable (that is, the one configured with the motor) should be firmly fixed to a stationary part (relative to the motor) and an additional cable loaded in the cable support should be used to delay it, so that the bending stress Can be reduced to the minimum. The radius of the cable elbow should be as large as possible
التاكات
منتجات مشابه

محرك وفان جاهز للربط مع الاردوينو
IQD 2,500

محرك مايكرو برشلس دي سي 8 دورات بالدقيقة
IQD 14,000

محرك برشلس ( 3930 او 4370 ) كيلو فولت مع متحكم 60 امبير
IQD 68,000

ماطور ديسي مع كيربوكس بسرعه 100 دورة بالدقيقة وعزم عالي
IQD 42,000

مضخة تفيرغ الهواء حجم ميني 6 فولت
IQD 6,500
محرك برشلس صغير 4300كيلو فولت
IQD 7,500
ماطور برشلس 8000كيلوفولت نوع دكت فان باتجاهين 11ريشة و قطر 3سم
IQD 45,000

محرك ماطور اي سي حثي مع متحكم سرعة 25 واط
IQD 77,000

مروحة تهوية حجم 9سم*9سم*2.5سم تعمل على 12فولت
IQD 2,500

مضخة دايفرام للتفريغ الهوائي برشلس 12فولت
IQD 21,000

فان بلور حجم 4*4*2سم
IQD 2,500

فان حجم 7سم*7سم*1سم ذو تبريد بالزيت
IQD 2,250

ماطور برشلس صغير عالي السرعة من الالمنيوم يعمل بفولتية من 7 الى 24 مع متحكم
IQD 22,500

مضخة صغيرة عمودية تعمل بفولتية 3 الى 5 و قوة دفع من 80 الى 100 لتر
IQD 3,750

مضخة غاطسة تعمل على 12 فولت و تدفع 600 لتر بالساعة بارتفاع 5
IQD 12,500

ماطور ديسي صغير مع اسلاك توصيل بفولتية من 3 الى 6
IQD 750

ماطور ستيبر حجم نيما 34 بعزم 4.5 نيوتن.متر
IQD 70,000

محرك سيرفو عالي العزم 380 كغم للسم يعمل بفولتية 12 الى 24 مع دشالي حديد
IQD 110,000

سولينويد للسحب والدفع 12فولت 10ملم 6نيوتن
IQD 7,500

فالف كهربائي يستخدم للماء والهواء يعمل على فولتية 24 فولت وقطر 6.5ملم
IQD 6,500

فالف براص يعمل على فولتية 12فولت او 24 فولت يستخدم للماء الحار
IQD 12,000

سيرفو دجتل بعزم عالي 40 كغم \ سم وبمحرك برشلس
IQD 49,000

ماطور سيرفو دجتل من شركة فيتك بغزم 35كغم وضط الماء
IQD 30,000

محرك ديسي كبير ذو عزم عالي يعمل على فولتية 12 فولت ويحتوي على علبة تروس بسرع مختلفة
IQD 14,000

محرك ديسي مع كير بوكس ذو عزم عالي بسرع مختلفة يعمل على 12 فولت
IQD 10,000

كت ماطور كبير 12 فولت 88 دورة بالدقيقة مع ويل كبير بحجم 130 ملم
IQD 44,000

محرك ديسي كير بوكس مع ويل وقاعدة تثبيت
IQD 16,000

فان 12فولت حجم 120*120*25 ملم
IQD 3,500

فان تبريد ايسي حجم 120*120*25ملم
IQD 6,750

ماطور ايسي 220 فولت 5الى6 دورة بالدقيقة
IQD 5,000